















Какие эмоции у вас вызвала эта публикация?

0

0

0

0

0

0
“Проблемы подводного звуковидения”
Водолазам известно, что свет распространяется под водой плохо – быстро затухает. Дальность видимости даже в самой прозрачной воде не превышает десятки метров, в то время как на воздухе она составляет километры. А если вода мутная, то дальность видимости может составлять нескольких метров, а то и несколько сантиметров.
Звук под водой распространяется значительно лучше. Даже в мутной воде на низких частотах (в десятки и сотни герц) звуковые колебания могут распространяться на километры. На более высоких частотах (десятки и сотни килогерц) звук распространяется на десятки метров. Вот почему дельфины (да и другие млекопитающие) используют звук для обнаружения и распознавания предметов под водой. Это мы и называем звуковидением.
Изучение голосов дельфинов показало, что они способны издавать множество различных звуков в диапазоне частот от 150 до 150 000 герц, т.е. в таком, который недоступен человеческому слуху. Заодно ученые выяснили, что дельфин пользуется своим голосом не только для передачи информации другим особям. Он использует его еще и как уникальнейший аппарат для гидролокации. С его помощью дельфин в самой мутной воде способен определить форму, размеры и материал предмета.
Совсем недавно исследователь дельфинов из Флориды Джек Кассевиц объявил, что открыл «секрет» речи дельфинов, который заключается в том, что они принимают и передают информацию в виде законченных картин с помощью ультразвуковых образов. Кассевиц считает, что именно большой головной мозг позволяет дельфинам общаться полномерными картинками, которые передаются звуковыми сигналами. При этом каждый звук, произносимый дельфинами, является голографической проекцией целого объекта. ()
А что же мы, люди, не способны создать приборы, которые бы видели под водой не хуже дельфина? Пытаемся создать и уже кое-что создали (см. мою книгу «Водолазная электроника»).
В 2000-х годах широкое распространение за рубежом получили гидролокаторы бокового обзора (ГБО) и многолучевые эхолоты (МЛЭ). Они использовались как профилографы (приборы, строящие профиль дна), и как средства поиска затонувших объектов. Принцип работы этих приборов представлен на рис. 1.
Это гидроакустические приборы, работающие на высоких частотах и имеющие высокую разрешающую способность по дальности и углу места. За счёт этих качеств они позволяют формировать акустические изображения подводных объектов.
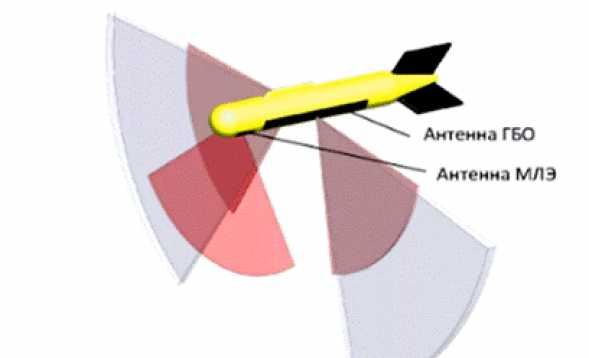
Рис. 1. Сектора обзора ГБО и МЛЭ.
Антенны ГБО размещаются по бортам подводного аппарата (ПА). Под днищем ПА образуется мёртвая зона. Антенна МЛЭ размещается под днищем ПА и перекрывает мёртвую зону. Вид затонувшего объекта на экране ГБО представлен на рис. 2.
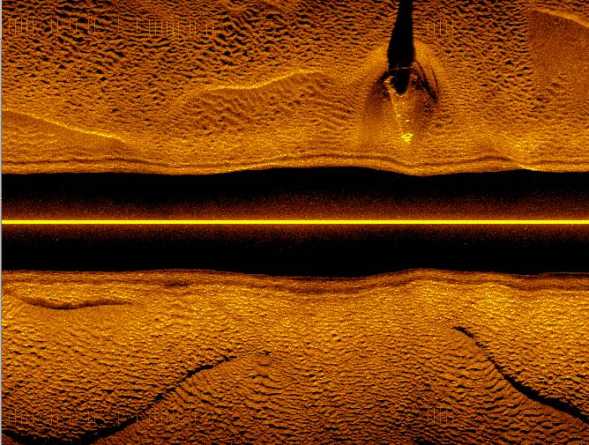
Рис. 2. Вид затонувшего объекта на экране
дисплея ГБО. В центре – тёмная мёртвая зона.
Из физики известно, что чем выше частота, тем короче длина волны, а чем короче волна, тем чётче видны мелкие детали предмета. Вот почему дельфины, да и конструкторы ГБО и МЛЭ используют высокие частоты для распознавания предметов. Например, если длина волны составляет 1 см (частота 150 кГц), то достаточно чётко можно видеть предметы размером в 10 см и более.
Однако, несмотря на малые габариты, современные ГБО и МЛЭ не могут использоваться водолазом. Они могут быть размещены только на подводных аппаратах, поскольку при их использовании необходима высокая стабильность курса, крена и дифферента. Иначе картинка будет смазана.
Для использования водолазом при поиске затонувших предметов более всего подходят подводные звуковизоры.
В середине 80-х годов НИИ «Риф» (г. Бельцы. Молдавской ССР) была выполнена НИР «Маска» в результате которой был создан первый отечественный звуковизор. Он работал на принципе акустической линзы с электронно-акустическим преобразователем (разработка АКИН, Москва) и давал изображения на экране электронно-лучевой трубки, которые иногда позволяли произвести классификацию (опознавание) объекта. Однако он имел значительные габариты и высокую стоимость и потому не получил дальнейшего развития.
Сейчас, на современной элементной базе (матрицы ПЗС с пьезокерамическими элементами, по типу стёкол первых смартфонов нажимного действия (теперь применяют стёкла ёмкостного действия)) можно создать недорогие и малогабаритные пьезочувствительные матрицы, позволяющие с высокой разрешающей способностью и чувствительностью улавливать звуковые волны, отражённые от подводных объектов. Т.е. может быть создан недорогой и эффективный звуковизор фронтального обзора (также, как и у фотоаппарата).
За рубежом в 80-е годы пошли по пути создания звуковизоров на принципах МЛЭ. Они получились меньше в размерах и дешевле, однако они не позволяют рассмотреть объект с фронтальной позиции (позволяют рассмотреть только сверху).
Позже на принципах МЛЭ и в НИИ «Риф» был создан звуковизор «Нептун», который по своим техническим характеристикам был близок к английскому звуковизору «BLUE VIEW». Звуковизор «Нептун» обеспечивал:
- получение гидроакустического изображения объектов и определение пеленга и дистанции;
- отображение данных на мониторе с возможностью сохранения и последующего просмотра.
Основные технические характеристики:
- рабочая частота, кГц - 450;
- дальность обнаружения подводных целей, м - до 140;
- количество лучей - 256;
- сектор обзора - 45 градусов;
- вероятность распознавания целей - 0,95;
- вес в воздухе, кГ - 5,75;
- размеры (максимальные), мм - 95х70х40;
- рабочая глубина до 300 м.
Высокочастотный звуковизор «Нептун» являлся полноценным звуковизионным устройством с функцией формирования двухмерного видеоизображения лежащего на грунте предмета. С помощью такого звуковизора легко идентифицировать объекты в воде с нулевой прозрачностью. Прибор был предназначен для водолазов, а также для применения в подводных системах безопасности. На рис. 3 показано изображение автомобильной шины, лежащей на грунте, на экране монитора звуковизора «Нептун» с дистанции 6 - 8 м в воде с нулевой прозрачностью.
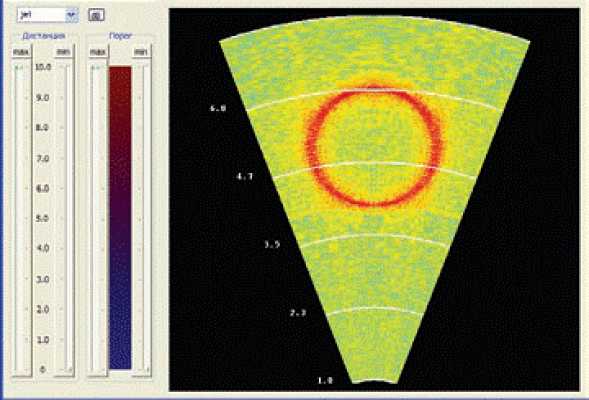
Рис. 3. Изображение шины от большегрузного автомобиля на экране звуковизора.
В настоящее время за рубежом создано несколько типов звуковизоров на принципах МЛЭ. В нашей стране после распада СССР звуковизоры не производятся.
Недостатками созданных в 80-х годах у нас и за рубежом звуковизоров фронтального действия с электронно-лучевыми акустическими преобразователями и звуковыми линзами, является низкое качество изображений, не позволяющее классифицировать предмет. Мы видим только те части изображения, которые отражают акустические волны в нашу сторону. В основном это отдельные блики, подобные тому, как ночью электрический фонарик выделяет только отражающие свет части объекта. По существу это бликовизор, который редко позволяет распознать обнаруженный объект.
Проблема заключается в том, что под водой отсутствуют фоновые звуковые засветки, создающие сплошную звуковую освещённость (в отличие от солнечного света на Земле, рассеянного атмосферой). Но , думаю, что выход из ситуации возможен и, причём, несколькими путями. Вот они (впервые изложены в моей книге «Водолазная электроника», 2017 г.).
На малых глубинах можно использовать поверхностную реверберацию (отражение звука от поверхности моря) для создания фоновой засветки. Для этого излучатель звуковизора направляется в сторону поверхности воды под определённым углом, а приёмные каналы по-прежнему смотрят на объект. Затем излучается мощный короткий импульс. Отражённые от поверхности звуковые волны облучают объект под разными углами, поскольку отражаются от поверхности разных морских волн. Это приводит к появлению фоновой засветки объекта и выявлению большого количества ранее не видимых деталей, но в основном в верхней части объекта. Вместе с прямыми (фронтальными) засветками, это позволит полнее выявить и классифицировать объект.
Другой путь - это стробирование приёмника звуковизора по дальности. После первичного обнаружения объекта дистанция до него уже известна. Перед следующим импульсом звуковизор автоматически настраивается так, что приёмный канал запирается до прихода отражённого сигнала с дальности немного (на несколько сантиметров) большей предыдущей. Теперь первичные блики от объекта уже не высвечиваются, а принимаются более дальние отражённые сигналы. Тем самым высвечивается та часть объекта, которая даёт отражения меньшей интенсивности. Так повторяется несколько раз, пока объект не будет полностью перекрыт стробированием по дальности.
В конце этой процедуры мы сможем увидеть только отражения звука от зоны объёмной реверберации находящейся за объектом. Перед ней будет тёмный силуэт объекта. Перевернув изображение на негатив, мы получим светлый силуэт объекта на тёмном фоне объёмной реверберации. Наложив ранее полученные изображения друг на друга, и обработав, мы сможем получить более качественное изображение объекта. Недостатки - требуется большая мощность зондирующих импульсов для получения эффективной засветки от донной, объёмной и поверхностной реверберации и многократное лоцирование объекта.
Следует отметить, что объёмная реверберация особенно велика в прибрежных мелководных морских районах, где много планктона, взвеси из воздушных пузырьков и частиц ила. Это позволит сделать предложенный метод вполне эффективным в прибрежных районах морей и океанов.
Следующий вариант – это облучение объекта с разных ракурсов звуковизорами двух, трёх водолазов и передача полученных изображений в единый центр обработки информации (например, на катер), а затем трансляция их водолазам в паузах между импульсами. Так разные изображения совмещаются, и получается более информативная картинка.
Этот метод мне подсказали дельфины, которые плавают стаями и одновременно лоцируют объект с разных ракурсов, а потом обмениваются полученными картинками и обрабатывают не только свою информацию от объекта, но и полученную от других дельфинов - соседей. Таким образом, получается, что дельфины видят группой, у них коллективное зрение!
Передача изображений в звуке возможна только на малых дистанциях. Частоты могут быть выше, чем у дельфинов (300 - 500 кГц) и мощности выше. Наложение изображений с разных ракурсов от разных водолазов позволит создать объёмное голографическое изображение предмета, что улучшит его распознавание. Конечно, чёткость картинки будет не та, что в оптике, но работать с ней можно. Передавать надо только те пиксели, в которых сигнал больше нуля. Это позволит уменьшить объём передаваемой информации.
А что же делать, если звуковизор у нас только один? В этом случае могу рекомендовать использовать взрывные источники звука, срабатывающие на разных ракурсах от объекта. Для этого можно использовать автомат подводной стрельбы АПС (калибр 5,66 мм) или пистолет СПП-1М, (калибр 5,45 мм) стреляющие иглами, длина игл 120 мм, но стрелять нужно другими, специальными иглами, которые взрываются на небольшом расстоянии от водолаза (наподобие новогодних хлопушек). Водолаз поворачивает пистолет в разные стороны и стреляет, то влево и вверх, то вправо и вниз. Звуковизор принимает отражённые сигналы от разных источников звука и строит картинки с разных ракурсов, а потом совмещает их и обрабатывает, получая комплексное изображение объекта.
Можно создать специальные многозарядные иглы с двумя или тремя зарядами, взрывающимися поочерёдно на дистанциях 2 - 3, 5 - 7 и 10 - 15 метров. В этом случае мы получим за один выстрел два - три разных источника звука и до четырёх ракурсов облучения подводного объекта (первый ракурс от звуковизора водолаза), что существенно повысит качество изображения.
Применяя искусственный интеллект для обработки полученных снимков, можно по нему построить изображение объекта близкое к фотографическому. Конечно, оно будет менее чётким по сравнению с фотографией, сделанной обычным подводным фотоаппаратом в прозрачной воде, из-за низкого разрешния, но вполне достаточным для распознавания объекта.
Чтобы оставить комментарий, необходимо зарегистрироваться.