















Какие эмоции у вас вызвала эта публикация?

0

0

0

0

0

0
“Что могут роботы?”
Роботы могут всё!
- Ну, это уж вряд ли, - скажите Вы.
А я Вам сейчас докажу. Роботы могут делать всё, что не может или не хочет делать человек! Они могут покорять заснеженные вершины самых высоких гор, спускаться в самые глубокие впадины океана, работать под землёй в шахтах, в тоннелях, в пещерах. Путешествовать по трубопроводам и даже внутри нашего организма.
- Ну, допустим, они смогут как-то двигаться по трубам, управляемые искусственным интеллектом, но им же надо работать! – скажите Вы. – Иначе, зачем им лезть в трубы? А как они смогут работать там? Ими надо управлять. Надо видеть рабочее поле. А управлять можно только по проводам. Радиоволны в трубах не распространяются.
Можно управлять по проводам, но это не самый лучший вариант. По проводам много информации не передашь. Поговорить можно, а изображения передавать сложно. Можно передавать, но замедленно, не в реальном масштабе времени.
- Но есть же высокочастотные коаксиальные кабели, - возразите Вы. – По ним управляются необитаемые подводные аппараты с телекамерами, передаются телевизионные изображения.
Есть такие аппараты и кабели есть, но это всё большие веса и габариты! А, следовательно, малая длина кабеля, небольшие расстояния – в сотни метров.
- Но сейчас телевизионные видеосигналы передают на большие расстояния с помощью оптоволоконных кабелей, - возразите Вы.
Верно. Не так давно появились волоконно-оптические линии связи (ВОЛС). Они обладают рядом преимуществ перед радио и проводными системами связи. Это:
- малое затухание сигнала (0,15 дБ/км) позволяет передавать информацию на значительно большее расстояние, чем по проводам без использования усилителей. Усилители в ВОЛС могут ставиться через 40, 80 и 120 километров, в зависимости от класса конечного оборудования;
- высокая пропускная способность оптического волокна позволяет передавать информацию на высокой скорости, недостижимой для других систем связи;
- высокая надёжность оптической среды: оптические волокна не окисляются, не намокают, не подвержены электромагнитному воздействию;
- информационная безопасность — информация по оптическому волокну передаётся «из точки в точку» и подслушать или изменить её невозможно;
- малые габариты и масса.
Волоконно-оптическая связь находит всё более широкое применение во всех областях — от компьютеров и бортовых космических, самолётных и корабельных систем, до систем передачи информации на большие расстояния, например, в настоящее время успешно используется волоконно-оптическая линия связи Западная Европа — Япония, большая часть которой проходит по территории России. Кроме того, увеличивается суммарная протяжённость подводных волоконно-оптических линий связи между континентами.
Рассмотрим ВОЛС более подробно.
Оптическое волокно, как правило, имеет круглое сечение и состоит из двух частей — сердцевины и оболочки. Сердцевина изготавливается из чистого материала (кварца, стекла) и имеет диаметр 9 мкм для одномодового волокна и 50 или 62,5 мкм для многомодового волокна. Оболочка имеет диаметр 125 мкм (это стандарт) и состоит из материала с легирующими добавками, изменяющими показатель преломления. Например, если показатель преломления оболочки равен 1,474, то показатель преломления сердцевины — 1,479. Луч света, направленный в сердцевину, будет распространяться по ней, многократно отражаясь от оболочки.
Одним из наиболее распространенных типов оптических кабелей являются оптические патч корды. В таком кабеле волокно защищено оплеткой и соединяется с коннекторами на обоих концах. Минимально допустимый радиус изгиба для стандартного оптического патч корда с волокном g657a1 обычно составляет не менее 15 мм. ().
Оптическое волокно, обладая малыми геометрическими размерами, может выдерживать значительные нагрузки. Однако оно подвержено сильному воздействию механических напряжений в процессе эксплуатации, что приводит к росту трещин. Поэтому в связи с указанной уязвимостью для практического применения оптическое волокно необходимо покрывать защитной оболочкой. Таким покрытием, например, могут быть один или несколько слоев полимерных материалов на основе акрилата, полиимида или металла (дюралюминий, нержавеющая сталь).
Микротрещины в стекле появляются при приложении растягивающей нагрузки. Теоретический предел прочности оптических волокон находится в интервале 20 - 25 ГПа. ( ).
Большинство исследователей измеряли предел прочности оптических волокон с алюминиевым покрытием диаметром 125 мкм (по стали данных нет), но вклад покрытия при этом не учитывали, считая, что основную компоненту прочности составляет кварц.
Результаты измерений прочности стандартных одномодовых волокон диаметром 125 мкм при длине образцов 0.5 м (количество образцов 20), скорость удлинения 20 мм/мин показали: при скорости 20 мм/мин образец волокна длиной 0.5 м удлинится на 7.5 % (37.5 мм) примерно за 2 мин. Волокно разрывается с очень узким разбросом значений при силе порядка 5.8 кгс ( ).
Оптическое волокно обеспечивает возможность оперировать с чрезвычайно высокими скоростями передачи. Уже к 2006 году была достигнута частота модуляции 111 ГГц, в то время как скорости 10 и 40 Гбит/с стали уже стандартными скоростями передачи по одномодовому каналу оптического волокна.
- Всё это хорошо, - скажите Вы, - но причём здесь роботы?
Согласен, роботы пока не просматриваются. ВОЛС прокладываются в зданиях, в корпусах кораблей, самолётов, под землёй, под водой, между континентами, но лежат они там неподвижно. Но почему их нельзя двигать? Почему нельзя наматывать их на катушку и сматывать с неё как нитки? Если оптоволокно имеет диаметр 0,125 мм, может изгибаться с радиусом до 15 мм, а рвётся при усилии 5,8 кг (с оболочкой из нержавеющей стали ещё больше), то почему его нельзя использовать в роботах, которые двигаются? Я не вижу никаких препятствий! Давайте-ка подумаем, а в каких случаях можно использовать роботы, управляемые по ВОЛС? Начнём с автономных необитаемых подводных аппаратов (АНПА) и подводных роботов как наиболее близкой мне теме.
1. Подводные АНПА и роботы.
АНПА могут применяться для: геодезии и картографии, геологоразведки, оценки биоресурсов морей и океанов, археологии, экологии, гидрологии, обследования подводных кабелей и трубопроводов, поиска затонувших объектов, осмотра подводных сооружений (нефтегазовых платформ, причалов, плотин, дамб, мостов и т.д.).
Можно снабдить АНПА манипулятором и тогда он станет подводным роботом. Примерная схема такого АНПА приведена на рис. 1.
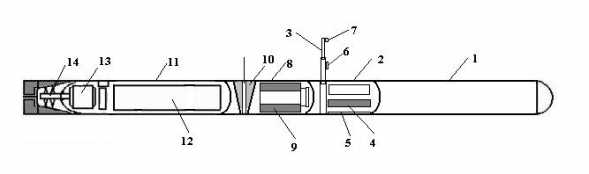
Рис. 1. Примерная конструкция роботизированного АНПА.
Цифрами на рис. 1 обозначены: 1- сменный (отделяемый) головной модуль с манипулятором; 2 – поисковый модуль, включающий: телевизионный перископ 3, антенну гидролокатора бокового обзора - 4, антенну многолучевого эхолота - 5, антенну курсового гидролокатора - 6, оптику -7; 8 – модуль связи и навигации с катушкой ВОЛС - 9 и радиобуем - 10; 11 – модуль движения с аккумуляторной батареей - 12, гребным биротативным электродвигателем - 13 и соосными гребными винтами - 14.
Оператор может находиться на надводном корабле и управлять АНПА с помощью планшета (ноутбука), подключённого к ВОЛС, которая сматывается с катушки 9 и опускается на грунт. При возвращении АНПА, его ВОЛС обратно наматывается на катушку. Однако в случае зацепа за подводное препятствие, оптоволокном придётся пожертвовать и вместо сматывания его на катушку, придётся выпускать ВОЛС до подхода АНПА к кораблю. Прочности ВОЛС в 5,8 кг маловато и обрыв ВОЛС может привести к потере АНПА. Однако прочность ВОЛС можно увеличить, если в его внешнюю оболочку из полиамида погрузить стальные нити. Тогда один и тот же АНПА может использоваться несколько раз без замены катушки ВОЛС.
Преимуществами АНПА с ВОЛС перед уже существующими АНПА, ведущими поиск по заданной программе является возможность:
- управления АНПА в процессе поиска (смены глубины, курса, скорости);
- передачи информации с АНПА на обеспечивающий корабль в реальном масштабе времени;
- классификации обнаруженных затонувших объектов;
- обозначения мест обнаруженных затонувших предметов маяками – ответчиками;
- захвата мелких затонувших предметов манипулятором АНПА;
- захвата манипулятором АНПА карабина с тросом, и зацепа затонувшего предмета.
- Но для движения АНПА нужна электроэнергия, - скажите Вы, а по ВОЛС электроэнергию передать нельзя.
Ну почему же? Если в полиамидную оболочку можно погрузить стальные нити, то можно погрузить и медные или алюминиевые. Тогда одномодовая ВОЛС может выглядеть так, как показано на рис. 2.
- Да, но диаметр этих нитей очень мал и большой ток по ним не пропустишь! – возразите Вы. – Нужны мощные силовые кабели.
Согласен. Поэтому АНПА должен иметь свою аккумуляторную батарею (АБ), обеспечивающую его движение, работу поискового модуля и работу манипулятора. Однако АБ можно подзаряжать малым током на ходу АНПА, это увеличит её энергоресурс. И потом, АНПА движется не всё время. Если он обнаружил нужный нам предмет, завис и работает манипулятором, то энергопотребление снижается. Можно делать и остановки на глубине, ложиться на грунт и подзаряжать АБ. Вода хорошо охлаждает ВОЛС и ток заряда АБ можно увеличить в несколько раз по сравнению с работой на воздухе. Возможная конструкция ВОЛС с нитями из стали и меди в полиамидной оболочке приведена на рис. 2.

Рис. 2. Примерная конструкция одномодовой ВОЛС для роботизированного АНПА.
Цифрами на рис. 2 обозначены: 1 – сердцевина из кварца диаметром 9 мкм; 2 – полиамидная оболочка; 3 – внешняя оболочка из акрила или другого пластика диаметром 125 мкм; 4 – прочные стальные нити; 5 – токопроводящие нити из меди или алюминия.
Можно было бы сделать одну токопроводящую оболочку (как в экранированном кабеле), но ток нужно передавать по двум проводам, изолированным друг от друга, поэтому единая оболочка не подходит.
Роботизированные АНПА могут погружаться на глубины в тысячи метров, картографировать дно, обследовать подводные кабели и трубопроводы, искать и поднимать затонувшие предметы и т.д.
2. Роботы для работы высоко в горах.
Такие роботы, могут летать как вертолёты, квадракоптеры, опускаться на небольшие площадки и выполнять геологоразведку, вести метеонаблюдения, спасать альпинистов, попавших в беду, производить сброс снежных лавин, прокладывать безопасные маршруты для туристов и линии проводной связи. Это всем известные беспилотные летательные аппараты (БПЛА).
- Но причём здесь ВОЛС? – спросите Вы. - БПЛА могут летать и без них, используя для управления радиоканалы в УКВ или СВЧ диапазоне.
Верно, но не совсем. Не везде в горах можно использовать радиосвязь. Она может пропадать в ущельях, за высокими горными хребтами, в пещерах. А связь по ВОЛС действует везде, где проложено оптоволокно.
- Но катушку с ВОЛС надо поднимать на БПЛА вместе с грузом. Это снижает полезную нагрузку, - заявит читатель.
Снижает, но незначительно. По моим расчётам катушка с ВОЛС диаметром 0,125 мм длиной 10 км будет весить около 1,6 кг. Кроме того, по мере сматывания ВОЛС вес катушки уменьшается, что облегчает подъём БПЛА на высоту.
3. Роботы для труб, тоннелей, шахт и пещер.
Такие роботы также могут управляться по ВОЛС оператором, находящимся в тёплом помещении недалеко от входа в трубу, в шахту или в пещеру.
Робот может двигаться по трубе, производить её осмотр и очистку от отложений. В шахтах он может добывать уголь, руду не опасаясь взрыва метана, обвала породы. Он может добывать уголь из затопленных шахт и тогда взрыва метана не будет, да и опасность обвала породы снижается. Даже если это и произойдёт – то люди не пострадают.
В пещерах он может проходить там, где не пройдёт человек. Может вести геологоразведку, выполнять археологические раскопки, составлять карты пещер.
Может робот двигаться и внутри человеческого тела. У нас полно труб! Это и сосуды, и пищевод, и кишечник, и бронхи. Конечно, робот должен быть маленький и двигаться он должен как червяк или как черепашка. Но это решаемые проблемы. Тут не нужна скорость, нужна безопасность. Это будет микроробот – микрохирург, микротерапевт.
4. Военные роботы.
Вот тут-то роботам с ВОЛС самое место! Главное достоинство ВОЛС – высокая скрытность и помехоустойчивость. ВОЛС нельзя обнаружить, поскольку она ничего не излучает. ВОЛС не боится ни каких электромагнитных излучений и её работу невозможно подавить. Работу ВОЛС можно только прервать разрывом оптоволокна. Но его надо сперва обнаружить, а потом – точно попасть! Но проще обнаружить и попасть в управляемую по ВОЛС технику. И оператор управляющий роботом по ВОЛС ни чем себя не демаскирует. Он может сидеть в блиндаже и видеть всё, что видит робот.
Военные роботы могут быть очень разнообразны. Это могут быть БПЛА или самоходные артустановки, миномёты, танки без экипажа. АНПА – самоходные мины или торпеды, могут быть АНПА – тральщики мин. Могут быть роботы – солдаты (разведчики, штурмовики, сапёры) или роботы – собаки со взрывчаткой. Могут быть и беспилотные грузовики, доставляющие оружие, боеприпасы, ГСМ. Поэтому будущие войны (если они вообще будут) – это войны роботов, управляемых по ВОЛС. Но я думаю, что руководителям государств хватит мудрости, чтобы не начинать войну роботов. Любая война – это горе, беды, смерть близких людей. Бороться за счастье народа нужно, но не путём войн и насилия.
Чтобы оставить комментарий, необходимо зарегистрироваться.